"RT-middleware (Robotics Technology Middleware) is a common platform standards for Robots based on the distributed object technology. RT-middleware supports the construction of various networked robotic systems by the integration of various network enabled robotic elements called RT-Components. The specification standard of the RT-component is discussed / defined by the Object Management Group (OMG). ...
In the RT-middleware, robotics elements, such as actuators, are regarded as RT-components, and the whole robotic system is constructed by connecting those RT-components. This distributed architecture helps developers to re-use the robotic elements, and boosts the reliability of the robotic system.
Each RT-component has port as an endpoint for communicating other RT-components. Every port has its type and the ports which have the same type can be connected each other.
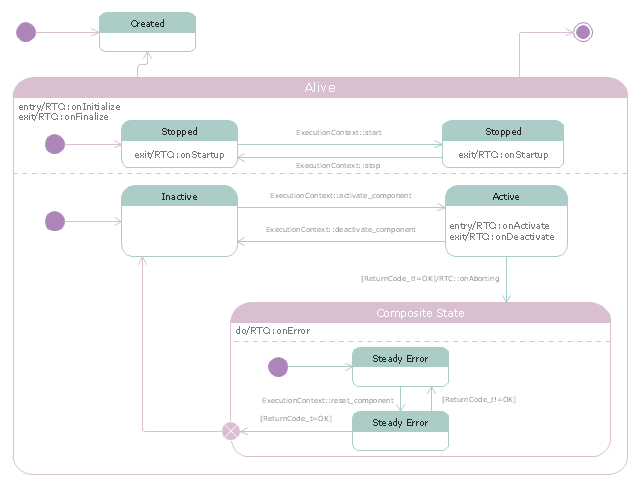
RT-components also has its state, so the RT-components behaves as state machines. The states that RT-components can have are CREATED, INACTIVE, ACTIVE, and ERROR, and the states and behaviors are controlled by the execution-context. If developers want to change the behavior of their RT-components, the execution-context can be replaced at run-time." [RT middleware. Wikipedia]
The UML state machine diagram example "State transitions of RT-component" was created using the ConceptDraw PRO diagramming and vector drawing software extended with the Rapid UML solution from the Software Development area of ConceptDraw Solution Park.
In the RT-middleware, robotics elements, such as actuators, are regarded as RT-components, and the whole robotic system is constructed by connecting those RT-components. This distributed architecture helps developers to re-use the robotic elements, and boosts the reliability of the robotic system.
Each RT-component has port as an endpoint for communicating other RT-components. Every port has its type and the ports which have the same type can be connected each other.
RT-components also has its state, so the RT-components behaves as state machines. The states that RT-components can have are CREATED, INACTIVE, ACTIVE, and ERROR, and the states and behaviors are controlled by the execution-context. If developers want to change the behavior of their RT-components, the execution-context can be replaced at run-time." [RT middleware. Wikipedia]
The UML state machine diagram example "State transitions of RT-component" was created using the ConceptDraw PRO diagramming and vector drawing software extended with the Rapid UML solution from the Software Development area of ConceptDraw Solution Park.
UML state machine diagram
- Conventional Representation Of Machine Components
- Machine Components Drawing
- Symbols Of Machine Components
- Drawing Of Machines Components
- UML state machine diagram - State transitions of RT- component ...
- Design elements - Machines and equipment | Components Of A ...
- UML state machine diagram - State transitions of RT- component | Rt ...
- UML State Machine Diagram.Design Elements | Workflow Diagram ...
- UML State Machine Diagram.Design Elements | UML Component ...
- About UML | UML Diagram | UML state machine diagram - State ...
- Uml Draw A Component Of Washing Machine
- Technical drawing - Machine parts assembling | UML State Machine ...
- Diagramming Software for Design UML State Machine Diagrams ...
- UML Component Diagram. Design Elements | UML Class Diagram ...
- State Machine Diagram | State Diagram Example - Online Store ...
- UML state machine diagram
- UML state machine diagram - Template
- Mechanical Drawing Symbols | Technical drawing - Machine parts ...
- Introductory Guide to Rapid UML Solution | UML state machine ...
- UML state machine diagram - Template | UML state machine ...